The primary research area of the Space Systems Laboratory is spaceflight kinetics, the study of forces acting on spacecraft and other objects in space. We are primarily interested in modeling, characterizing, and manipulating forces acting on a spacecraft in order to improve trajectory propagation, understand the expected performance of actuation systems, or enable entirely new actuation methods. A secondary interest is in understanding the impact that operating different actuation systems may have on the spacecraft (e.g., surface contamination) or surrounding environment (e.g., climate considerations on Earth or planetary protection considerations for other planetary bodies).
In-Space Thruster Performance Characterization
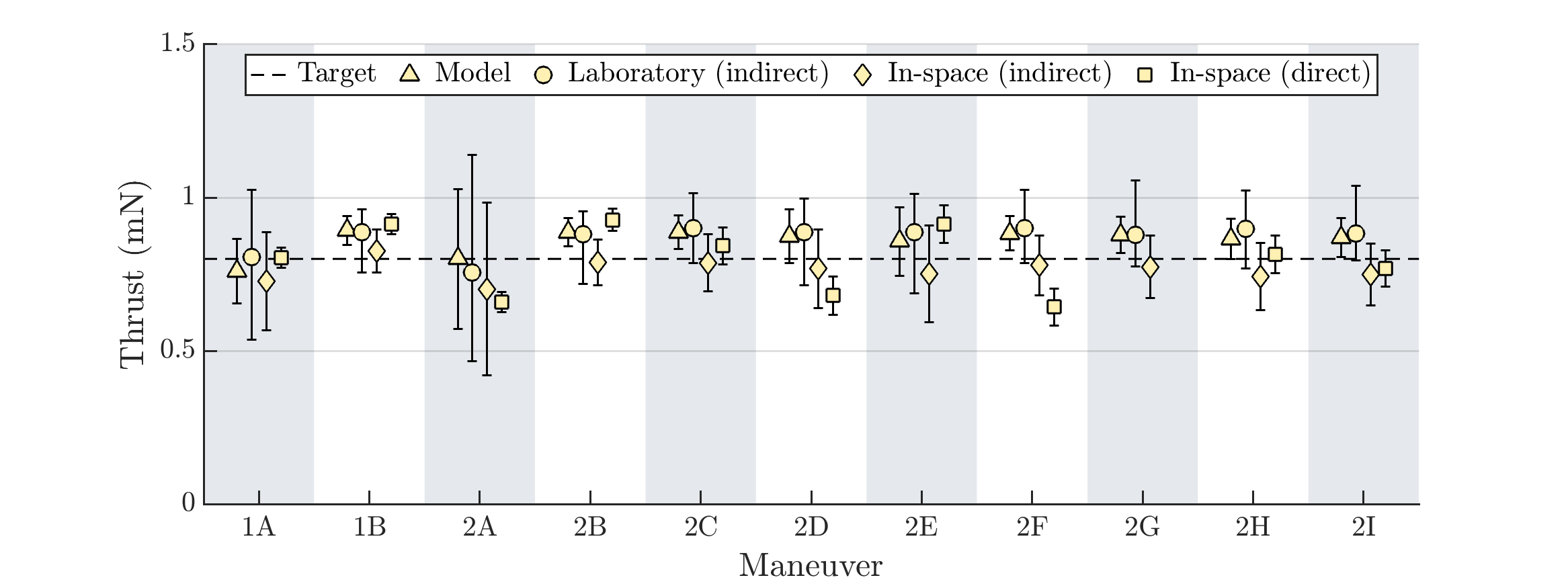
Predictions or estimates of the thrust output of a propulsion system can come from analytical or numerical modeling, laboratory testing, and in-space testing. Our focus has been developing methods for direct in-space thrust estimation, where the thrust of the propulsion system is inferred from measurements of the spacecraft’s position during an orbital maneuver. We consider both analytical approaches, in order to gain intuition into the inference process, and numerical approaches in order to account for complex model uncertainties. These numerical methods can be used to complete thrust audits for new propulsion systems, where thrust estimates from modeling, laboratory testing, and in-space testing are compared for consistency. The paper
O. Jia-Richards and T. Lafleur, “Iodine Electric Propulsion System Thrust Validation: From Numerical Modeling to In-Space Testing,” Journal of Propulsion and Power, vol. 39, no. 6, pp. 896-904, 2023, DOI: 10.2514/1.B39198
completes a thrust audit for the ThrustMe NPT30-I2 iodine-based gridded ion thruster. The figure below shows the results of the study, demonstrating consistency between the model, laboratory, and in-space thrust estimates across 11 different orbital maneuvers. Ongoing work is focused on improving our understanding of the direct in-space thrust estimate procedure through quantification of model uncertainties, optimization of the orbital maneuver used to obtain the thrust estimate, and optimization of the measurement timings.
Space Traffic Management and Coordination
This work is supported by funding from the University of Michigan Space Institute.
Environmental Impacts of Space Exploration
Initial project information can be found here.
This work is supported by funding from the University of Michigan College of Engineering.